Controlled rollgang settings
The PUMOTIX feature allows you to configure one or more motors to control the rollgang.
Make sure that you have access to a license to control the rollgang before setting up. You can check the availability of a license for a feature in the menu "Configuration" → "License Manager". Expand the "General Features" node in the PUMOTIX features tree. You can use the trial period if the "Controlled rollgang support" feature is not activated.

Activation of the trial period of the "Controlled rollgang support" feature
As an example, consider the setup of a pipe cutting machine with a rollgang, working in tandem with a rotary axis B.
Go to the menu item "Configuration" → "Settings" → "Motors" to start configuring.
The following figure shows an example of setting up motors for a pipe cutter mounted along the Y axis of the machine. The pipe cutter is controlled by two independent motors: one rotates the chuck, the other rotates the rollgang.
For the convenience of further configuration, we will rename the rotary axis motors to “Chuck” and “Rollgang”.

Motors Settings
You need to go to the “Axes” settings tab after setting up the motors. Select the rotary axis from the drop-down list at the top of the window. In this example we use the B axis.
Make sure that basic axis parameters, such as movement parameters, are configured.
Let's move on to setting advanced motor parameters for the rollgang when the basic characteristics of the axis have been configured. To do this, in the right part of the axes settings window, turn to the “Additional features” block.
From the drop-down list you must select the motor that is connected to the rollgang.
Check the "Motor as Rollgang" option to "tell" the system that this motor is part of the rollgang.
The basic idea of automatic rollgang control in PUMOTIX is the following points:
- There is only one rotary axis (A or B), but there can be several motors attached to the rotary axis (for example, a chuck and a rollgang).
- The speed F and moving distance (for example, G0 B720) are set for the rotary axis, not for the rollgang motor.
- The rollgang rotation speed should be calculated automatically based on three parameters:
- rollgang roller diameter;
- count of STEP pulses to rotate the roller by 1 degree;
- diameter of the pipe installed on the rollgang.
Для того, чтобы система могла автоматически рассчитать поправочный коэффициент для связи диаметра трубы со скоростью вращения роликов, необходимо внести в настройки системы следующие данные:
- Диаметр приводного ролика рольганга (в мм или дюймах).
- Количество импульсов STEP для поворота ролика на 1 градус.

Настройка осей
Введите недостающие значения в настройки приводного рольганга и нажмите кнопку "Применить" в правом нижнем углу окна настроек.

Расширенные настройки приводного рольганга
Обратите внимание, что автоматически активировалась опция "Задать значение STEP для двигателя". Поле значения STEP стало доступно в данном случае только для чтения. Иконка с желтым треугольником предупреждает нас о том, что значение количества импульсов STEP для двигателя приводного рольганга будет автоматически рассчитываться исходя из заданных параметров рольганга и диаметра трубы. К заданию диаметра трубы мы перейдем позже.
Теперь этот двигатель определен для управления рольгангом, о чем во вкладке "Двигатели" свидетельствует появившаяся иконка.

Отображение двигателя рольганга
На данном этапе настройки двигателей и осей можно считать завершенными.
Для тестового запуска поворотной оси с приводным рольгангом необходимо определить диаметр трубы, которая будет использоваться для обработки.
Диаметр трубы в модулях плазменной и газокислородной резки PUMOTIX можно задать двумя способами:
- Из графического интерфейса PUMOTIX. Поле ввода параметра находится на вкладке "Параметры процесса" → "Диаметр трубы".
- С помощью специального M-кода с параметром. Например, M94 P400 (где 400 - диаметр трубы).

Для подготовки УП в SheetCam THG рекомендуется использовать специализированный постпроцессор:
Чтобы выбрать данный постпроцессор в SheetCam, перейдите в меню Настройки → Установки станка → Postprocessor → Import post и укажите путь к файлу.
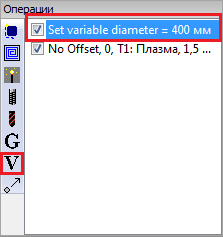
Для выгрузки УП с использованием данного постпроцессора необходимо задать диаметр трубы. Для этого в спискеопераций нажмите кнопку Установка пост переменной, из выпадающего списка variable name выберите переменную diameter и укажите значение внешнего диаметра трубы.
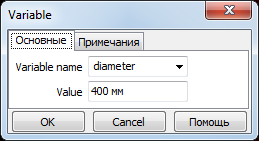
В сформированную УП постпроцессором будет добавлена команда M94 P400, сообщающая ЧПУ системе PUMOTIX используемый диаметр трубы.

Если параметр Диаметр трубы не удовлетворяет указанным ограничениям, использование поворотной оси, для которой настроен рольганг, будет недоступно как из УП, так и в режиме ручных перемещений, с отображением соответствующего предупреждения.
Поздравляем, мы настроили двигатель для управления приводным рольгангом. Можно начинать работу!