G81: Цикл сверления
G81 (X- Y- Z-) or (U- V- W-) R- L-
Цикл G81 предназначен для сверления.
Цикл включает следующие действия:
- Предварительное перемещение, описанное в разделе "Постоянные циклы".
- Перемещение оси Z с текущей скоростью подачи на позицию Z.
- Ось Z совершает быстрое перемещение на высоту возврата по Z.
Пример 1
Предположим, текущая позиция (X1, Y2, Z3) и выполняется следующая строка G-кода:
G90 G98 G81 X4 Y5 Z1.5 R2.8
В примере при выполнении команды действует абсолютный режим позиционирования (G90) и режим возврата на исходную высоту по Z (G98).
Будут иметь место следующие перемещения:
- Быстрое перемещение в плоскости XY в точку (X4, Y5).
- Быстрое перемещение по оси Z в точку (Z2.8).
- Перемещение по оси Z с заданной скоростью подачи в (Z1.5).
- Быстрое перемещение по оси Z в (Z3).
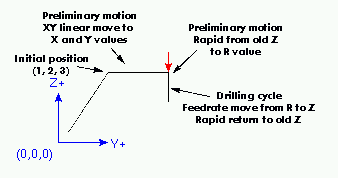
Команда G81. Пример 1
Пример 2
Предположим, текущая позиция (X1, Y2, Z3) и выполняется следующая строка G-кода:
G91 G98 G81 X4 Y5 Z-0.6 R1.8 L3
В примере при выполнении команды действует инкрементальный режим позиционирования (G91) и режим возврата на исходную высоту по Z (G98). Команда выполняет цикл сверления три раза. Начальная позиция по X равна 5 (=1+4), начальная позиция по Y равна 7 (=2+5), высота возврата по Z равна 4.8 (=1.8+3), целевая позиция по Z равна 4.2 (=4.8-0.6). Исходная позиция по Z равна 3.
При предварительном перемещении производится быстрое перемещение по оси Z в позицию (X1, Y2, Z4.8), поскольку исходная высота по Z меньше высоты возврата.
Первая итерация цикла состоит из 3 перемещений:
- Быстрое перемещение в плоскости XY в (X5, Y7).
- Перемещение по оси Z с заданной скоростью подачи в (Z4.2).
- Быстрое перемещение по оси Z в (X5, Y7, Z4.8).
Вторая итерация цикла состоит из 3 перемещений:
- Быстрое перемещение в плоскости XY в (X9, Y12, Z4.8).
- Перемещение по оси Z с заданной скоростью подачи в (X9, Y12, Z4.2).
- Быстрое перемещение по оси Z в (X9, Y12, Z4.8).
Третья итерация цикла состоит из 3 перемещений:
- Быстрое перемещение в плоскости XY в (X13, Y17, Z4.8).
- Перемещение по оси Z с заданной скоростью подачи в (X13, Y17, Z4.2).
- Быстрое перемещение по оси Z в (X13, Y17, Z4.8).
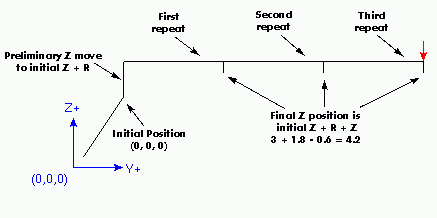
Команда G81. Пример 2
Пример 3
Предположим, что текущая позиция (X0, Y0, Z0) вместо (X1, Y2, Z3), и выполняется строка G-кода:
G90 G98 G81 X4 Y5 Z1.5 R2.8
Так как исходная высота по Z меньше значения параметра R, в ходе предварительного перемещения будет выполнено начальное перемещение по Z.