G81: Drilling Cycle
G81 (X- Y- Z-) or (U- V- W-) R- L-
The G81 cycle is designed for drilling.
The cycle includes the following actions:
- Preliminary movement described in the section "Canned Cycles".
- Move the Z axis with the current feedrate to Z position.
- The Z axis moves quickly to the return height along Z.
Example 1
Suppose the current position (X1, Y2, Z3) and the following line of G-code is executed:
G90 G98 G81 X4 Y5 Z1.5 R2.8
In the example, when the command is executed, the absolute positioning mode (G90) and the mode of returning to the initial height in Z (G98) are valid.
The following movements will take place:
- Quick movement in the XY plane to the point (X4, Y5).
- Fast movement along the Z axis to a point (Z2.8).
- Moving along the Z axis at a given feedrate in (Z1.5).
- Fast movement along the Z axis in (Z3).
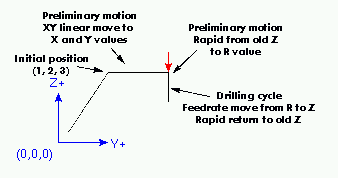
Command G81. Example 1
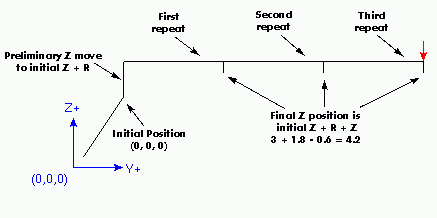
Example 2
Suppose the current position (X1, Y2, Z3) and the following line of G-code is executed:
G91 G98 G81 X4 Y5 Z-0.6 R1.8 L3
In the example, when executing the command, the incremental positioning mode (G91) and the mode of returning to the initial height in Z (G98) are effective. The machine performs a drilling cycle three times. The initial position in X is 5 (= 1 + 4), the initial position in Y is 7 (= 2 + 5), the return height in Z is 4.8 (= 1.8 + 3), the target position in Z is 4.2 (= 4.8-0.6 ) The initial position in Z is 3.
During the preliminary movement, a quick movement along the Z axis to the position (X1, Y2, Z4.8) is made, since the initial height in Z is less than the return height.
The first iteration of the loop consists of 3 movements:
- Fast movement in the XY plane in (X5, Y7).
- Moving along the Z axis at a given feedrate in (Z4.2).
- Fast movement along the Z axis in (X5, Y7, Z4.8).
The second iteration of the loop consists of 3 movements:
- Fast movement in the XY plane in (X9, Y12, Z4.8).
- Movement along the Z axis with a given feedrate in (X9, Y12, Z4.2).
- Fast movement along the Z axis in (X9, Y12, Z4.8).
The third iteration of the cycle consists of 3 movements:
- Fast movement in the XY plane in (X13, Y17, Z4.8).
- Movement along the Z axis with a given feedrate in (X13, Y17, Z4.2).
- Fast movement along the Z axis in (X13, Y17, Z4.8).
Command G81. Example 2
Example 3
Suppose that the current position (X0, Y0, Z0) instead of (X1, Y2, Z3), and a line of G-code is executed:
G90 G98 G81 X4 Y5 Z1.5 R2.8
Since the initial height in Z is less than the value of the parameter R, during the preliminary movement, the initial movement in Z will be performed.