Выполнение подготовительного перемещения
В процессе работы периодически возникает необходимость остановить выполнение G-кода, произвести технологические операции, переместив при этом инструмент, и вернуться на исходную траекторию. Также часто приходится запускать G-код не сначала, а с конкретной строки, например, для обработки одной из нескольких заготовок, содержащихся в G-коде. Программное обеспечение PUMOTIX решает обе эти задачи, позволяя продолжить выполнение G-кода с произвольной строки без потери координат.
Подготовительное перемещение осуществляется из текущей позиции к началу выбранной строки, т.е. фактически к концу предыдущей строки. Например, в G-коде
N99 G0 Z30
N100 G1 X200 Y300
N101 G1 X250 Y300
N102 G1 X250 Y400
выберем строку №101 и нажмём «Старт». Будет выполнено подготовительное перемещение в точку (X200; Y300; Z30) и продолжено выполнение G-кода со строки №101.

Пример выполнения подготовительного перемещения
PUMOTIX дает возможность выбора стратегии возврата инструмента:
- по прямой (с указанной подачей);
- по прямой (G0) + Z (с указанной подачей);
- последовательно (с указанной подачей).
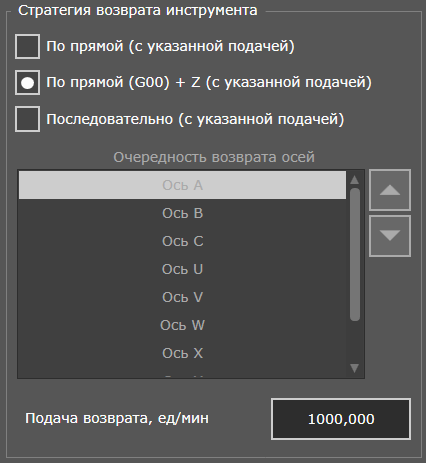
Выбор стратегии возврата инструмента
Подготовительное перемещение "по прямой" с указанной подачей выполняется сразу по всем осям с заранее заданной подачей возврата. Т.е. инструмент будет двигаться к началу выбранной строки, выбирая кратчайший путь по каждой из осей движения.
Перемещение "по прямой + Z" происходит последовательно по осям X, Y, A, B, C, U, V, W на холостой (ускоренной) подаче, а затем по оси Z - на заданной (уменьшенной) подаче.
"Последовательное" перемещение осуществляется в очередности, устанавливаемой пользователем. По умолчанию сначала будет выполнено перемещение по осям A, B, C, U, V, W, затем по X, Y и в последнюю очередь по Z. Подача будет осуществляться на установленной скорости возврата.
На рисунке ниже показано, как при запуске выполнения G-кода с указанной строки (траектория 4) сначала происходит перемещение по X (отрезок 1), затем по Y (отрезок 2), после чего шпиндель опускается по Z (отрезок 3) к началу выбранной строки.
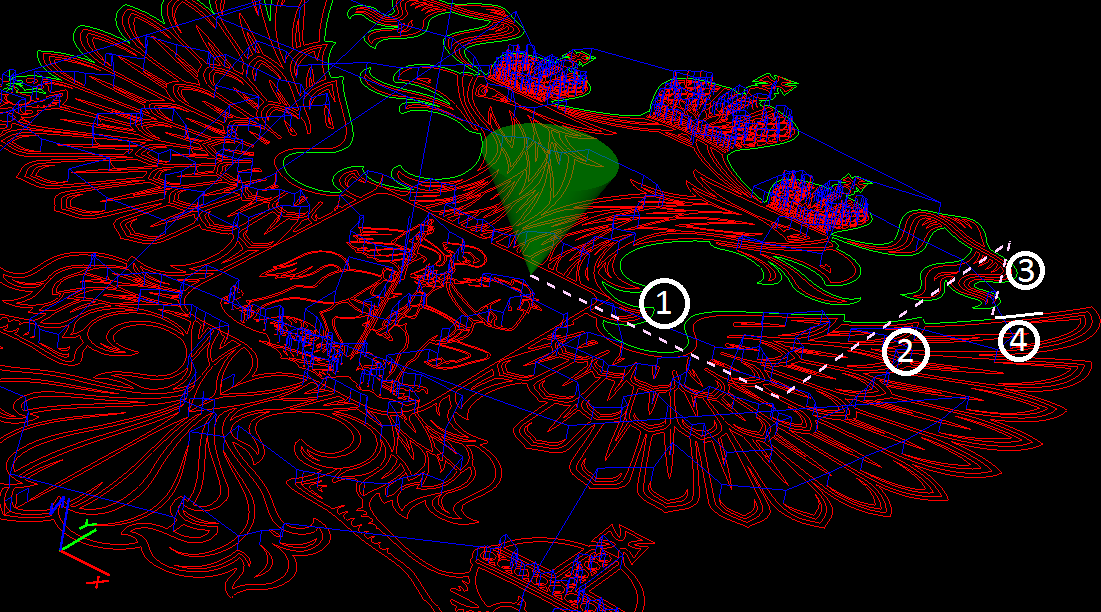
Последовательность движения инструмента по осям при выполнении подготовительного перемещения
Выбор стратегии возврата инструмента осуществляется в «Настройках» на вкладке «Инструмент» → «Стратегия возврата инструмента». Там же имеется возможность настроить скорость подачи, с которой осуществляется подготовительное перемещение (по умолчанию 1000 мм/мин).
В любом случае оператор после остановки выполнения G-кода должен вручную поднять инструмент по оси Z, произвести необходимые манипуляции, затем установить инструмент на безопасной высоте над точкой, куда будет выполнено подготовительное перемещение (приблизительно, чтобы при переезде по X и Y не было препятствий). После этого можно нажать кнопку «Старт».